Trusted Business
Verified & Licensed
Virus Free Files
100% Safe Downloads
Secure Payment
SSL Protected
Instant Delivery
Available Immediately
CAT BUCYRUS DRESSER 204-M MARION Programmable System for Shovel Control Operation Manual BI005708 – PDF DOWNLOAD
$28.95
CAT BUCYRUS DRESSER 204-M MARION Programmable System for Shovel Control Operation Manual BI005708 – PDF DOWNLOAD
Instant PDF Download
Available immediately
Save to Your Device
Download & keep forever
Antivirus Scanned
100% virus-free
Trusted Worldwide
175,000+ customers
Description
CAT BUCYRUS DRESSER 204-M MARION Programmable System for Shovel Control Operation Manual BI005708 – PDF DOWNLOAD
FILE DETAILS:
CAT BUCYRUS DRESSER 204-M MARION Programmable System for Shovel Control Operation Manual BI005708 – PDF DOWNLOAD
Language : English
Pages :200
Downloadable : Yes
File Type : PDF
DESCRIPTION:
CAT BUCYRUS DRESSER 204-M MARION Programmable System for Shovel Control Operation Manual BI005708 – PDF DOWNLOAD
GENERAL DESCRIPTION
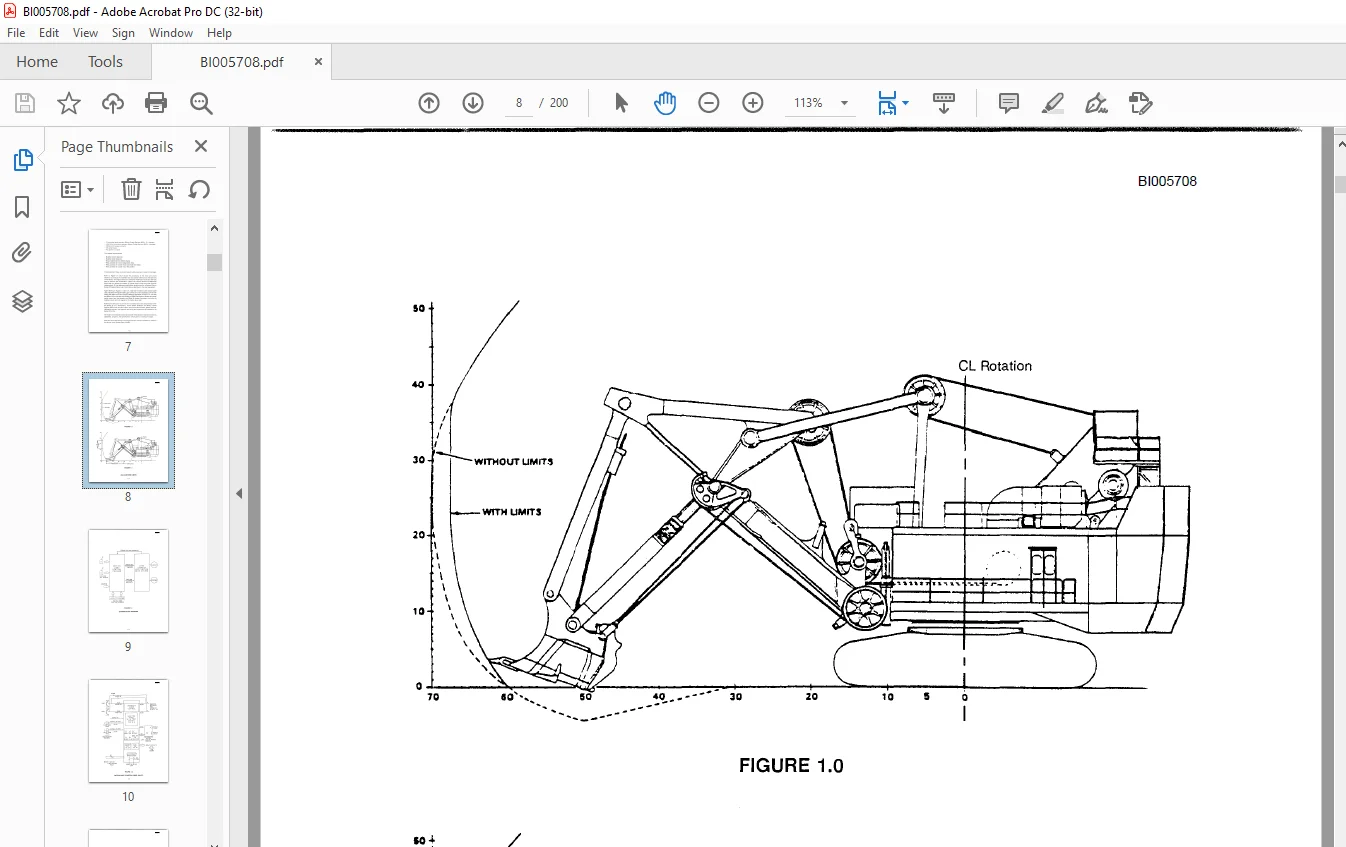
- This section provides a general description of the overall operation of the Motion Limit Control for the 204-M mining shovel. Refer to Figures 1.0 and 1.1. These illustrations show the general layout of the 204M SuperFront shovel and the motion limits desired to achieve optimum digging from the machine. Because of the unique front end geometry of the SuperFront shovel, the shovel is able to move its dipper in a flat trajectory across the surface to be dug, achieving high digging efficiency and breakout forces.
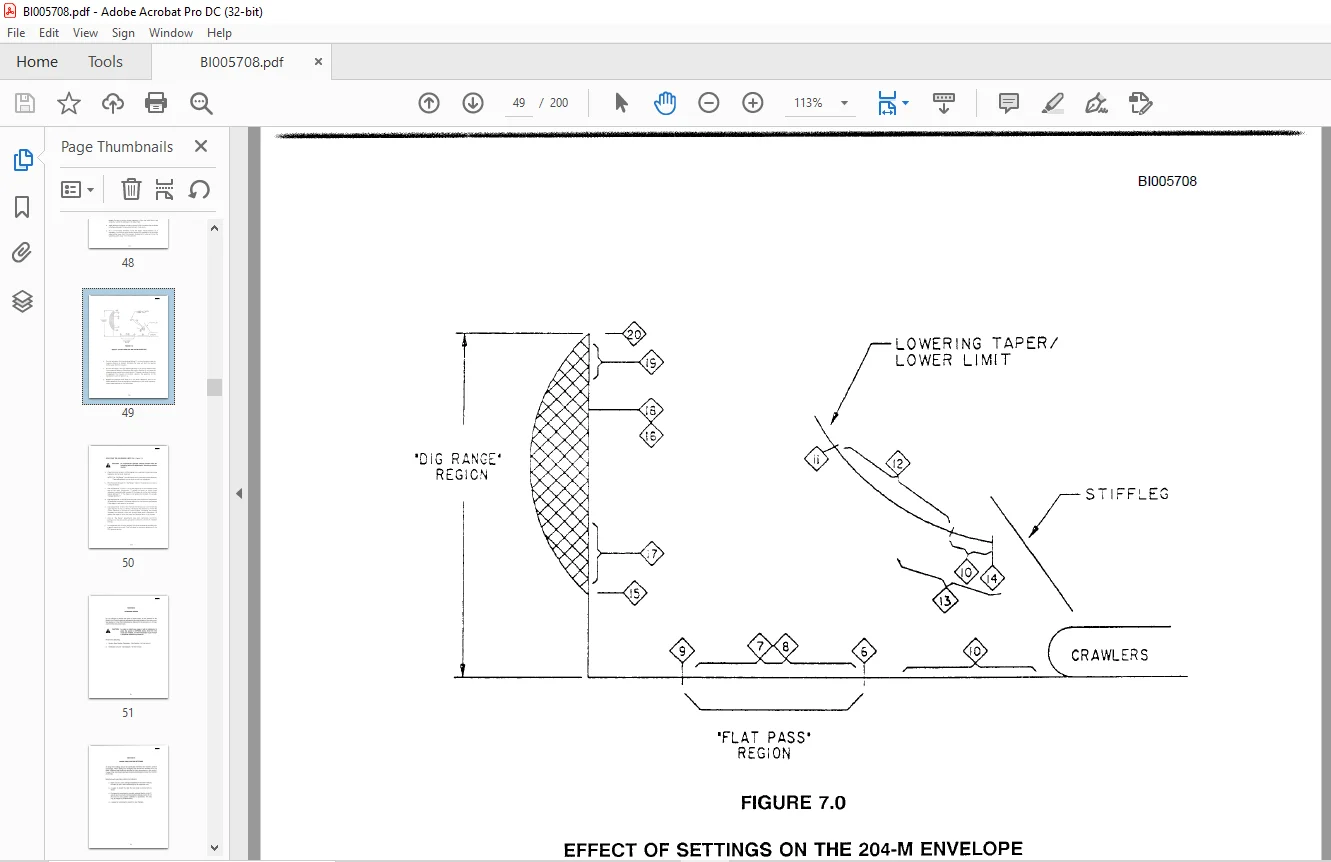
- The 204M Motion limit Controller modifies the reference commands given to the shovel by the operator from his master control switches, when required to provide the optimum digging trajectory for the shovel dipper. In the digging region, this optimum path can be broken up into two areas: the “Flat Pass” region, and the “Dig Range limit” region. These are shown in Figure 1.1 . In the FLAT PASS region the requested automatic Motion limit Control should enable the operator to move his bucket horizontally across the digging surface.
- In the DIG RANGE LIMIT region the motion limit control should prevent the dipper from undercutting the bank of material being dug, and instead, give a vertical wall by limiting the radius of digging to a certain fixed value. In addition to the automation-assisted digging described above, the Motion Limit Control provides limits to the motion of the hoist and crowd to avoid equipment damage due to over-travel of the dipper, hoist or crowd mechanisms. Additional protection is provided to keep the dipper under control by avoiding high velocity while lowering the dipper near the end of travel.
- Refer to Figure 1.2. This illustration shows the system block diagram of the Motion limit Control package as it is implemented into the basic 204M crowd and hoist motion drive system. Note that the Motion Limit Control package for the 204M is a command reference modifier to the basic crowd and hoist motion drive system. That is, the motions requested by the operator by means of his master switches are modified as a function of hoist and crowd position, when required.
Refer to Figure 1.3. This figure shows the Motion Limit Control panel as a rectangular block in the center. Shown also are the various inputs and outputs from the system. System inputs are:
– CROWD master switch signal (analog,
– Hoist master switch signal (analog,
IMAGES PREVIEW OF THE MANUAL:
Need help? Contact: [email protected]
https://vimeo.com/862003065?share=copy
PLEASE NOTE:
- This is the SAME exact manual used by your dealers to fix your vehicle.
- The same can be yours in the next 2-3 mins as you will be directed to the download page immediately after paying for the manual.
- Any queries / doubts regarding your purchase, please feel free to contact [email protected]
S.M